Creating Drawings from Digital Images
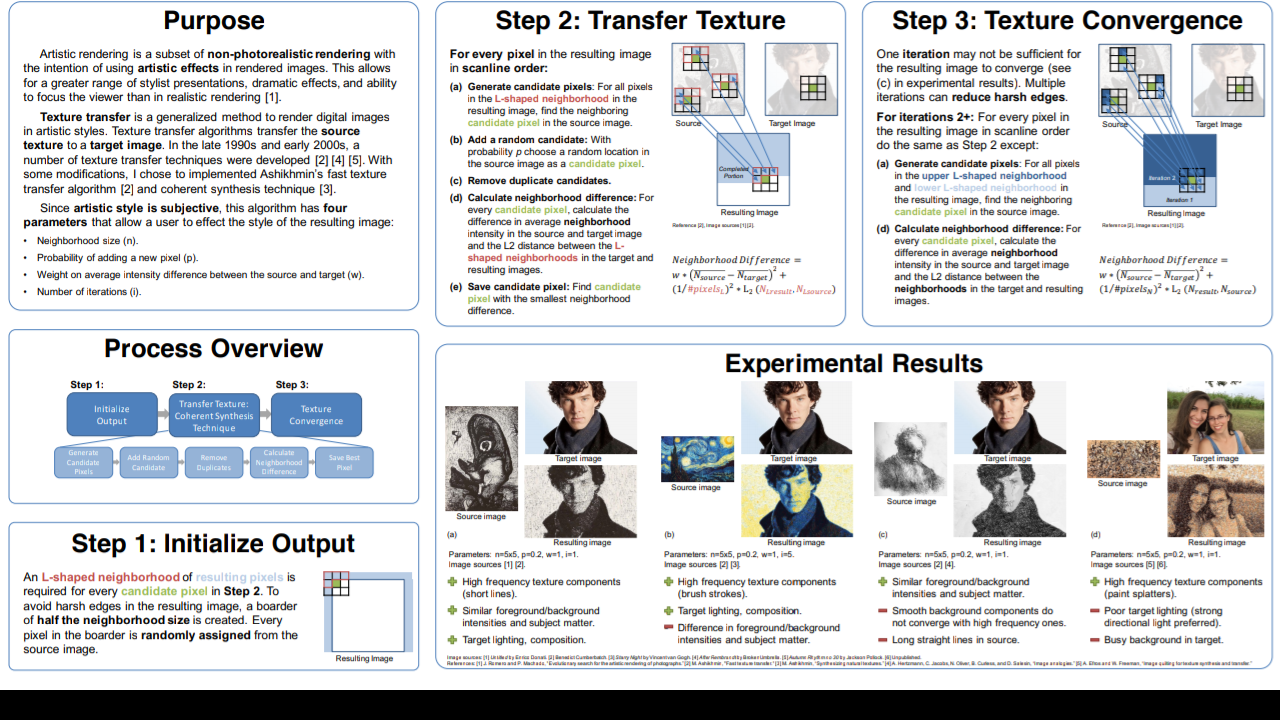
Creating Drawings from Digital Images Description There are many algorithms out there for non-photorealistic rendering of images to look like drawings. Jin et al and Li et al create drawings from images by creating directional lines that match the intensity of the image. However, the resulting images don’t stylistically look like an artist drew them. Efros et al found that image quilting can be used to transfer a specific drawing style to an image such that it looks like it has actually been drawn by an artist. I will attempt to implement his algorithm to create drawings from digital images. Plan I believe the following steps will be necessary to creating drawings from digital images that resemble the drawings of famous artists. 1. Split the source texture (for example Enrico Donati’s drawing) into overlapping blocks of size B. 2. Split the source image into overlapping blocks of size B. 3. Choose a block f...